
Free-Flying Lunar Drones and Their Crucial Role in Moon Exploration
We Are in a Renaissance of Lunar Surface Discovery
We find ourselves in an exciting new era of lunar surface exploration, one that rivals the grandeur of the Apollo program. In 2022, the United States marked its return to lunar exploration with the Artemis I mission. Both Artemis II and the highly anticipated return of humans to the lunar surface are planned for 2025..
India also entered the lunar scene with a remarkable achievement as its uncrewed Chandrayaan-3 spacecraft gracefully touched down on the Moon’s surface. Meanwhile, China and the European Space Agency have revived their efforts and launched their respective missions.
Unlike the pioneering days of the Apollo program, modern lunar missions promise extended stays to tackle more intricate technological challenges and make even greater scientific discoveries in preparation for the next frontier — missions to Mars.
We require missing but essential moon surface observational data to understand the characteristics, possibilities, and economic viability of lunar resource exploitation. The demanding and rugged terrain of some regions renders the current surface rover vehicles ill-suited for gathering that missing data.
That’s where SoftServe comes in. We’ve been researching an alternative approach to mapping lunar surfaces: free-flying vehicles that offer a more efficient mobile method for mapping the Moon’s surface.
But before we delve into SoftServe’s free-flying machine research, let’s first explore the question: Why the Moon?
Why Is the Moon so Important?

The Moon is not only a crucial testing ground for technologies that will eventually enable human settlements on other planets. It also holds immense importance due to its ancient surface, which preserves a significant portion of the Earth-Moon system’s history thanks to its relatively unchanged terrain.
Gaining precise and accurate Moon surface data not only enhances our understanding of Earth and the solar system but also paves the way for groundbreaking discoveries in various other realms of space exploration, such as:
Unlocking Lunar Resources
An essential aim of lunar exploration is harnessing resources found on the Moon itself. Extracting materials, particularly water and rocket propellants, from the lunar surface reduces our reliance on Earth for essential supplies, fostering a more sustainable Earth-Moon transportation network. This approach frees up resources for ambitious missions beyond the Moon.
Lunar Polar Ice: A Game-Changer
Orbital missions since 1994 have revealed hydrogen-rich environments in the Moon’s permanently shadowed regions (PSRs), particularly near the poles. Bistatic radar measurements and neutron scattering mapping confirm the presence of different types of frozen gasses like H2O, CO2, ammonia in PSRs, and elevated hydrogen levels in high latitudes, even beyond PSRs. Lunar ice can provide drinking water, cooling equipment, hydrogen fuel, and breathable oxygen to support future Moon missions and the exploration of other planets.
Lunar Pits and Lava Tubes: Shelters for the Future
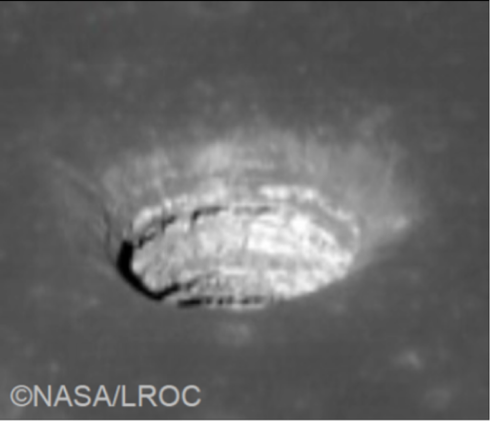
Skylight in Mare Tranquillitatis as imaged by LRO / LROC
Exploring lunar pits and lava tubes unveils potential shelters. Skylights, discovered by missions like KAGUYA and LRO, offer access to caves and lava tubes, providing natural radiation shielding, stable temperatures, and protection from micrometeorites. Researchers continue to investigate their role as cold traps for ice. These features, especially lava tubes, hold promise for space settlements, accommodating astronauts and opening new frontiers for human exploration.
Accurate Moon surface data is important for the future of planet exploration, and free-flying lunar drones provide a solution to achieve the required level of data precision.
More About SoftServe’s Lunar Drones

Exploring and studying lunar ice deposits at ground level near the Moon’s poles is currently planned for upcoming missions to the Moon and will require repeated attempts to investigate candidate sites in situ. The rough terrain makes this even more complicated; surface rovers can be greatly assisted by drones to fully investigate potential sites on the ground.
SoftServe has been studying free-flying vehicles, referred to as lunar drones, as another method of post-landing mobility in lunar exploration. Leveraging the Moon’s modest gravitational pull and the absence of an atmosphere, these rocket thruster-propelled drones can execute powered or ballistic flight trajectories. This approach proves highly efficient for regional exploration and rapid vehicle relocation, covering kilometer-scale distances within minutes, regardless of surface conditions.
Due to their proximity to the lunar surface and ability to hover over points of interest, these lunar drones and rovers can acquire high spatial resolution and exceptional signal-to-noise remote sensing data, as well as contact measurements when set down at selected locations.
Lunar Drone Notional Concept
A successful lunar drone mission requires multi-landing capability and faster cumulative flight times. This can be accomplished by reducing the vehicle’s dry mass by deliberately incorporating innovative technologies. SoftServe has created the conceptual design of an onboard guidance system tailored for a lunar drone with a wet mass of approximately 70 kg. This system enables control-powered flight, precise landings, and seamless takeoffs, employing vision-based navigation equipped with a monocular camera system and an inertial measurement unit (IMU). It integrates a simultaneous localization and mapping (SLAM) algorithm, facilitating autonomous navigation to predefined targets while concurrently mapping the surrounding terrain accurately.
Typical flight speeds reach approximately 15 m/s while the drone maintains flight altitudes at several tens of meters above the lunar surface. SoftServe adopted a simulation-first approach, modeling the complete flight behavior and the visual SLAM guidance and navigation system, complete with required sensors. This was accomplished using ROS (robot operating system) and NVIDIA Isaac Sim, an extensible robotics simulator. Built on the NVIDIA Omniverse development platform for OpenUSD applications, Isaac Sim facilitated the precise execution and validation of guidance, navigation, and control (GNC) algorithms.
To simulate lunar terrain, inspiration was drawn from lunar satellite datasets. In the Isaac Sim environment, artificial sensors simulated the Moon’s surface as the lunar drone hovered above it. The simulator’s physics, combined with visualization tools, enabled 3D point cloud generation and the collection of images, which were converted into a comprehensive 3D map of the environment. The simulation results are available at the following link: Simulation Video.

Still from simulation of the SoftServe drone concept as flying inside a lunar lava tube
Mission Scenarios - Exploring the Possibilities

We’ve discussed the significance of the Moon and why lunar drones represent the future of lunar exploration. Now, let’s delve into the mission scenarios.
- Lunar drones could be delivered to the lunar surface as part of upcoming uncrewed and crewed lunar landing missions. These free-flying vehicles would take off after the main spacecraft’s landing and execute their assignments based on mission profiles determined on Earth and transmitted to the drones.
- In a notional design reference mission studied and simulated by SoftServe, the lunar drone would navigate a lunar lava tube using one of the discovered lunar skylights as the entry and exit points. This mission aligns with the interests of the science community and various space exploration advocacy groups, as lunar pits and lava tubes hold potential as sheltered habitats and windows into lunar geology.
- In a separate lunar drone mission, the goal would be to explore a PSR on the Moon. The drone would be delivered to a landing site near a PSR, and the vehicle would traverse the threshold into the shaded terrain, flying over the interior of the PSR. During descent in powered flight or free fall from an initial altitude of a few tens of meters (to avoid thruster plume impingement on the terrain below), the drone would progressively acquire remote sensing data using radar, thermal IR imaging, and laser reflectometry as it approached the ground. The drone might either be directed to impact within the PSR or perform a soft landing for brief contact measurements, enabling unprecedented insights into the nature of lunar ice.
To facilitate these missions, free-flying lunar drones with precise mobility capabilities offer a stable platform for close-range terrain and material observations, serving as excellent scientific tools. SoftServe has explored potential solutions for these lunar drones, including their autonomous flight control and navigation systems.
We invite interested parties to collaborate with us to further develop these concepts.