
Wheels are great on smooth roads but when it comes to rough, uneven, or unpredictable terrain, legs win. That’s why multilegged robots, also called quadruped robots, have gained momentum over the past few decades: they can go where wheeled machines cannot.
Mining was one of the first industries to adopt legged machines. A famous example is the Big Muskie, a 15,000-ton behemoth built in 1969 for coal mines.
Today, legged robots are making their mark across many industries, handling physically demanding tasks and boosting productivity. Development has become a global effort, led by innovators in the USA (Boston Dynamics, MIT), Switzerland (ANYbotics, ETH Zurich), and China (Unitree Robotics).
QUADRUPED ROBOTS: SPEED, STABILITY, AND AGILITY
Quadruped robots are popular because they combine speed, stability, and agility, making them ideal for navigating challenging terrain. Some well-known models include TITAN, SILO4, KOLT, AiDIN, MBBOT, StarlETH, as well as ANYmal, LittleDog, WildCat, and Spot.
Despite their proliferation, only a few quadruped robots have made it into real-world applications. Robots like Spot and ANYmal are now being deployed outside the lab, offering a wide range of capabilities, including:
- Navigation: moving efficiently through complex environments
- Sensing: detecting obstacles and gathering environmental data
- Stair climbing: handling multi-level terrain
- Obstacle avoidance: reacting to unexpected barriers
- Uneven terrain negotiation: maintaining stability on rough surfaces
Among the quadruped robots currently available, Spot has gained particular attention for its versatility and real-world applications. Let’s take a closer look at it in the following sections.
SPOT: A VERSATILE QUADRUPED ROBOT
Spot is a versatile quadruped robot that can move quickly, carry heavy payloads, and even be equipped with a robotic arm, expanding the range of tasks it can perform. It excels in missions that are dangerous or difficult for humans, such as:
- Inspecting hazardous areas contaminated by radioactivity
- Automating data collection
- Transporting payloads across unknown or uneven surfaces
Boston Dynamics provides Spot’s Software Development Kit (SDK), enabling developers to extend its capabilities beyond joystick control. With the SDK, you can:
- Create custom control applications and autonomy systems
- Integrate sensors and custom payloads using Spot’s mechanical and electrical interfaces
- Build a personalized user interface to control Spot’s body position, velocity, and movement
The latest release enhances data collection services and even introduces a choreography feature, letting you program Spot to dance to your favorite music.
TESTING SAFELY: WHY WE NEED ROS DRIVERS
While Spot’s SDK allows developers to create custom applications and control the robot, testing directly on the real machine can be costly, risky, and time-consuming. Boston Dynamics doesn’t provide an official simulation tool for Spot, which is essential for safely testing applications before deploying them in the real world.
Simulating Spot and its environment offers several key benefits:
- Reduces development costs
- Speeds up the design of control systems
- Minimizes downtime
- Improves operational reliability
- Enables testing in fault or error scenarios
- Reduces the need for physical prototypes
- Allows testing of multiple robots in a virtual environment
To support this, Clearpath Robotics provides a ROS driver — software that enables robots to communicate and be controlled via the widely used Robot Operating System (ROS). This driver accelerates app development without using Spot’s API, while giving access to all onboard sensors. In collaboration with Boston Dynamics, Clearpath also provides a URDF model, a simplified 3D representation of the robot used for visualization in simulations. Note that this model doesn’t account for physical properties and can be used only for visualization.
Additionally, Webots offers a custom, non-official Spot simulation that can be integrated with ROS, allowing developers to safely test applications in a virtual environment before running them on the real robot.
OPEN-SOURCE SIMULATION PACKAGES
SpotMicro
Spot’s popularity has inspired developers to create smaller and more affordable robots, such as SpotMicro, developed by Deok-yeon Kim. This open-source project provides a simulated environment for testing and implementing control algorithms for quadruped robots.
Key features of SpotMicro include:
- A control algorithm based on MIT Cheetah control, modified to allow any combination of forward, lateral, and yaw commands at customizable step heights, lengths, and speeds.
- Inverse kinematics lets developers precisely control the robot’s body position.
- The ability to walk on challenging terrain using reinforcement learning (RL).
- Simulation support for both PyBullet and Gazebo, popular physics-based robot simulation platforms.
- Cost: approximately $600, making it accessible for research and experimentation.
- Unlike Spot, SpotMicro gives developers the freedom to design and test their own low-level control algorithms.
- Its primary use is for scientific research and the study of legged robots.
SoftServe’s Gazebo simulation package
Clearpath provides a Spot visualization tool for Rviz, but it isn’t suitable for full simulation in Gazebo. The SoftServe robotics group enhanced this tool to make it compatible with Gazebo. We added mass and inertia to all robot links, connected actuators to joints, and attached contact sensors to the feet.
To work with the control system from the SpotMicro project, we also tuned the robot’s kinematics and dynamics models to match Spot’s real geometry and movement characteristics. This allows developers to simulate Spot’s motion using existing control algorithms from SpotMicro.
The package is available on GitHub, where you can:
- Launch virtual robots and experiment in one of SoftServe’s offices or a custom simulated environment.
- Implement your own control algorithms, using forward kinematics to move individual legs (Video 1) or inverse kinematics to control the body position (Video 2).
- Unlike SpotMicro, SoftServe’s package supports multi-robot simulations, allowing each robot to work on separate tasks or collaborate on a joint mission.
Video 1. Spot controlled by forward kinematics in one of SoftServe’s offices.
Video 2. Spot controlled by inverse kinematics in one of SoftServe’s offices.
Champ
Champ is another open-source package that can be used to simulate Spot. It’s designed for building and testing quadrupedal robots and comes with a preconfigured Spot simulation for Gazebo. Its control algorithm is based on MIT Cheetah control.
Unlike SpotMicro, Champ is fully autonomous using the ROS navigation stack, which allows the robot to navigate environments without manual control. However, it cannot handle uneven terrain. Users can create maps of custom environments using gmapping. Though in our experience, hector SLAM, another mapping tool, produces more accurate maps in environments with complex layouts or obstacles.
Video 3 shows Spot navigating one of our offices using Champ. Keep in mind that neither SpotMicro nor Champ simulate Spot’s ability to climb stairs, which the real robot can do.
Video 3. Spot navigates a SoftServe office using champ.
Towr
Climbing stairs remains a challenge for most quadruped robots. Towr, short for Trajectory Optimizer for Walking Robots, is an open-source project that generates and optimizes movement trajectories for legged robots on challenging surfaces, including stairs. It uses ifopt to optimize trajectories and xpp to visualize robot motion.
Robots such as HyQ and ANYmal are supported by Towr, and the SoftServe robotics team successfully adapted Towr and xpp for Spot. We used the dynamic model provided in Towr for Single Rigid Body Dynamics, which uses the mass of the robot and a matrix of rotational inertia. In the kinematic model, we specified the positions of the hips on the body frame and the joint limits to manage Cartesian control. We use this information to visualize the robot in xpp.
The implemented version of Spot’s inverse kinematics visualization is available on GitHub. For more technical details, we recommend consulting this scientific paper and related tutorials.
Towr also lets you customize the terrain. For instance, we added extra steps to the original stair set to generate a trajectory that allows Spot to climb them effectively (see video below).
Video 4. Spot climbs stairs in towr.
AWS ROBOMAKER: CLOUD-BASED SIMULATION AT SCALE
Using cloud platforms to model and test robotic applications is becoming increasingly popular in the robotics industry. One of the more advanced platforms is AWS RoboMaker, which allows developers to simulate, test, and deploy robotics applications at scale.
Key features of AWS RoboMaker include:
- Support for ROS extensions
- Integration with popular tools like Gazebo, Rviz, and rqt
- The ability to simulate, test, and deploy applications with multiple robots
- Simulation of robotics applications in different virtual environments
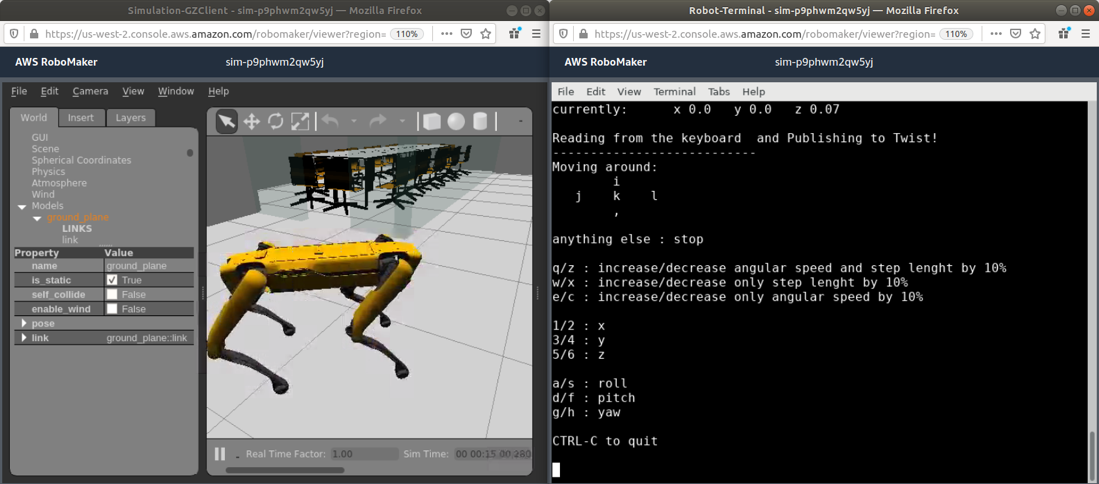
SoftServe has successfully deployed Spot on AWS RoboMaker, with the project available in this GitHub repository. To simplify deployment, the project was split into two parts: a robot application and a simulation application. The simulation application includes a virtual model of our Ukrainian headquarters in Lviv.
Developers can also create their own virtual worlds or generate randomized, user-defined environments using AWS RoboMaker WorldForge, providing endless opportunities to test Spot safely and efficiently.
Contact SoftServe to learn more about how we can help you train Spot for new tasks and applications.
Start a conversation with us